靶向药物递送是一类能够显著提高药物在人体特定部位浓度的医疗技术,在癌症等疾病的治疗中具有极高的疗效。该技术的核心在于如何将药物准确地运送到病灶,从而减少对健康组织的伤害,降低副作用。现有的靶向递送策略主要有两种。第一种策略是通过人体内循环的被动递送方案。尽管这种方案已经被用于临床。但是这种被动递送方案只能使0.7%-5%的药物能够到达目标部位。这意味着需要大幅增加药物的剂量,以弥补药物在运输过程中的损失,同时潜在的风险在于未能到达病灶的药物可能在健康组织中残留,导致免疫反应、心脏毒性等不良反应。相较第一种的被动运输方案,第二种靶向药物递送方案利用微型机器人等微小的非侵入式装置,将药物直接运输到病变的位置。这种主动运输方案更加快速可控,并有更高的成功率让药物释放到正确的位置,极大地避免了药物在健康组织中的残留。因此,主动递送有望在更少的毒性和副作用下,实现更好的治疗效果。然而,现有的绝大多数毫米级机器人只能运输一种药物。少数可以携带两到三种药物,但它们无法调整药物的释放顺序或剂量,也无法选择性地释放药物,或运输并释放到多个病变位置。
为了解决这一问题,新加坡南洋理工大学Lum Guo Zhan教授,杨梓麟博士,许昌瑀博士等人,创造性地将机械振动响应地结合到了磁驱动微型机器人中,提出了一种新型毫米级软体机器人。该机器人能够携带四种不同的药物,并且可以根据指令,在多个位置选择性地释放药物,且释放的顺序和剂量均可重构。这种机器人由智能磁性复合材料构成,具备良好的生物相容性,不会对细胞造成明显的损伤或死亡。此外,这种机器人还具有六个自由度,并能利用滚动或者步行的方式跨越不规则的地形,将药物运输到多个位置。这种机器人由此显示出了在靶向联合治疗方面的极大潜力。相关工作以“Magnetic miniature soft robot with reprogrammable drug-dispensing functionalities: towards advanced targeted combination therapy”为题发表在最新一期《Advanced Materials》上。
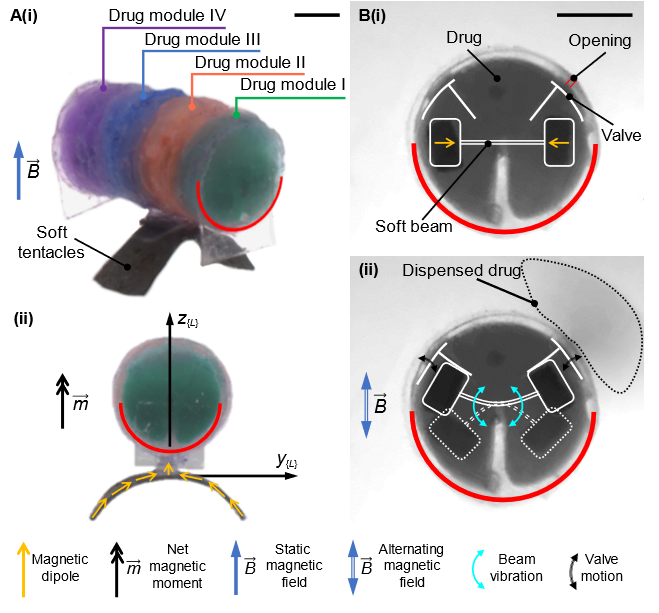
图1. 提出的新型微型软体机器人,可以携带四种不同的药物,并能够重构其药物释放顺序和剂量。 (A) 所提出的软体机器人的结构。 (i) 软体机器人的三维视图,显示其具有四个药物模块和一对软触手。(ii) 软体机器人的侧视图。红色半圆形轮廓用作软体机器人方向的参考。 (B) 药物模块的顶部视图。 (i) 每个药物模块有一对相同的磁性振动梁和一个带有单一开口的阀门。 (ii) 当磁性振动梁受到指定频率和振幅的交变磁场作用时,它们会振动并撞击模块中的阀门,从而释放药物。红色半圆轮廓对应(A)中的轮廓。底部图例指示了图中对应的箭头表示。比例尺:1毫米。该软体机器人由一对磁控软触手和四个独立的药物模块组成,每个药物模块能够携带一种不同的药物。每个药物模块内部含有一对磁化的振动梁,这些振动梁的能够外部磁场的振动信号,并以此控制药物的释放。当外部施加特定频率和幅度的磁场时,药物模块内部的振动梁会产生足够大的振动并撞击阀门,从而触发药物的释放。研究人员精心设计了每个模块的振动梁的自然频率和刚度,使其对不同频率的磁场有特定的响应。这意味着,操作者可以通过调节磁场的频率和幅度,选择性地激活不同的药物模块,实现精准的药物释放。图2. 演示该新型的软体机器人能够解耦其运动和药物释放机制,并且能够选择性地释放药物。比例尺:1毫米。第一个实验展示了该机器人能够成功运输并释放四种药物,这相比现有的所有微型机器人是一项重要的进步,因为它们最多只能携带三种药物。此外,该机器人能有选择性地释放不同的药物,与现有的只能同时释放所有药物的机器人相比,这种软体机器人显著地提升了药物释放的精准性和灵活性。同时,该机器人在药物释放后仍能保持运动能力,这使得它可以在完成一个治疗任务后继续前往下一个治疗区域,展现出其在执行多病灶的靶向治疗的潜力。为了评估软体机器人的药物释放性能,研究人员进行了多个实验。首先,他们制作了与机器人相同的药物模块,并将其放置在平坦的基底上,通过四组交变磁场驱动这些模块,评估它们是否能够选择性释放药物。实验结果显示,只有在模块中的振动梁受到指定频率和磁场强度的交变磁场作用时,药物才会被释放。研究人员使用计算机视觉技术测量了每个模块在8小时内的药物释放率,结果表明,在2小时内,各模块可以释放0.282至0.586微升的药物,这一释放率足以支持多种联合疗法。8小时内,所有药物模块的平均释放率为0.144至0.231微升/小时。此外,研究还证明了这些药物模块能够在20°以内倾斜的表面上正常工作。图3. 软体机器人的药物模块通过四组交变磁场进行驱动。实验结果表明,只有当模块内的振动梁受到特定频率和磁场强度的交变磁场作用时,药物才会被释放,否则药物将继续保留在模块中。比例尺:2毫米。为了测试药物模块在不同环境中的鲁棒性,研究人员还把模拟的药物换成了一种荧光染料,并在更粘稠的缓冲液中进行了实验。结果显示,即使在这种高粘度环境下,药物模块依然能够有选择地释放药物。此外,该机器人在不受控时的药物泄露量极低(仅为1%-2%)。这些实验结果显示,这种机器人具备在不同条件下稳定地有选择地释放药物的鲁棒性,由此展现出在更复杂环境中有选择释放药物的潜力。
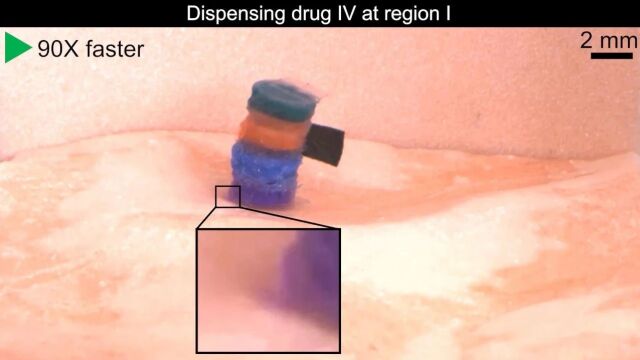
视频1:软体机器人在生物假体的三个区域重构药物释放顺序和剂量。最后研究人员将该机器人部署在一个生物假体环境中,并控制其在三个不同区域按指定顺序和剂量释放四种药物。在实验中,机器人可以灵活地切换滚动和步行的运动方式,穿越复杂地地形到达目标区域,并在指定区域重构药物的释放顺序和剂量。总的来说,这是一种由智能磁性复合材料制成的微型软体机器人,其具备独特的振动响应和磁驱动特性。与现有的技术相比,该机器人的突破性在于,它能够运输四种不同的药物,并且还能够根据外部指令,在多个位置重构其药物释放顺序和剂量。此外,由于该机器人具备完整的六自由度运动能力,其灵活性远超现有的具备药物释放能力的五自由度微型机器人。这款微型软体机器人为智能磁性复合材料和小型机器人技术带来了重要进展,并为通过主动递送方法实现更复杂地靶向联合疗法提供了更多可能性。--检测服务--